![]() RoboEarth is a World Wide Web for robots: a giant network and database repository where robots can share information and learn from each other about their behavior and their environment.
RoboEarth is a World Wide Web for robots: a giant network and database repository where robots can share information and learn from each other about their behavior and their environment.
The goal of RoboEarth is to allow robotic systems to benefit from the experience of other robots, paving the way for rapid advances in machine cognition and behaviour, and ultimately, for more subtle and sophisticated human-machine interaction.
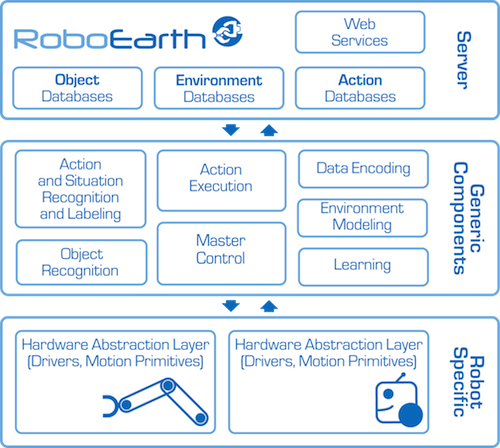
RoboEarth will include everything needed to close the loop from robot to RoboEarth to robot. The RoboEarth World-Wide-Web style database will be implemented on a Server with Internet and Intranet functionality. It stores information required for object recognition (e.g., images, object models), navigation (e.g., maps, world models), tasks (e.g., action recipes, manipulation strategies) and hosts intelligent services (e.g., image annotation, offline learning).
To close the loop, the RoboEarth Collaborators will also implement components for a ROS (Robot Operating System) compatible, robot-unspecific, high-level operating system as well as components for robot-specific, low level controllers accessible via a Hardware Abstraction Layer.
[advt]The aim of RoboEarth is to use the internet to create a giant open source network database that can be accessed and continually updated by robots around the world. With knowledge shared on such a vast scale, and with businesses and academics contributing independently on a common language platform, RoboEarth has the potential to provide a powerful feed forward to any robot’s 3D sensing, acting and learning capabilities.
RoboEarth is funded by the Cognitive Systems and Robotics Initiative from the European Union Seventh Framework Programme FP7/2007-2013.
Project Scope
The RoboEarth project was initiated by a multi-disciplinary partnership of robotics researchers from academia and industry. Their goals:
- to prove that connection to a networked information repository greatly speeds up the learning and adaptation process that allows robotic systems to perform complex tasks, and
- to show that a system connected to such a repository will be capable of autonomously carrying out useful tasks that were not explicitly planned for at design time.
In December 2009, the group received four-year funding from the European Commission’s Cognitive Systems and Robotics Initiative to develop RoboEarth’s open-source network database platform and develop a series of demonstrators to prove the concept.
The demonstrators include using the RoboEarth platform to:
- create and execute action recipes
- integrate localization and mapping
- perform 3D sensing
- learning control
- track objects dynamically
- mine data from RoboEarth past data
The hope is that, with a proof of concept in place, the RoboEarth database can be used as a launch pad for further research and development, leading eventually to standardization, common language protocols and a more modular design of robotic systems.
Be the first to comment